将整套贯入设备稳定支撑于试验孔海床面上,将探头通过探杆或套管从海床面连续贯入到土中。其优点在于能够在空间上保证贯入路径的完整性,其缺点在于直接连续的贯入方式和触探基准决定了此种工艺不适合深层海底测试,如遇到深层贯入,很难保证贯入路径与海平面的垂直度,此时,需要提供较大的贯入力来平衡探杆匀速运动时土体产生的摩阻力等等。
重型海床静力触探(CPT)试验系统是一种重型的水下静力触探(CPT)系统。具有重量大、贯入力大、贯入深度大、作业水深大等特点。一般重量在5~28吨,贯入力在4~20吨,作业水深从几百米到3000m,甚至4000m,贯入深度可达20m,在正常固结的软粘土中可贯入30~60m。主要适用于水下管线调查、沉管隧道、跨海大桥、砂矿调查、钻井船位置调查及综合海洋勘探等。
国外重型的海床静力触探(CPT)试验系统主要有荷兰辉固(Fugro)集团公司的SEACALF系统(图1)、荷兰Geomil Equipment B.V. 公司的MANTA-200系统(图2)、荷兰范登堡(A.P.Van Den Berg)公司的ROSON系统(图3)。



图1 SEACALF系统 图2 MANTA-200系统 图3 ROSON 系统
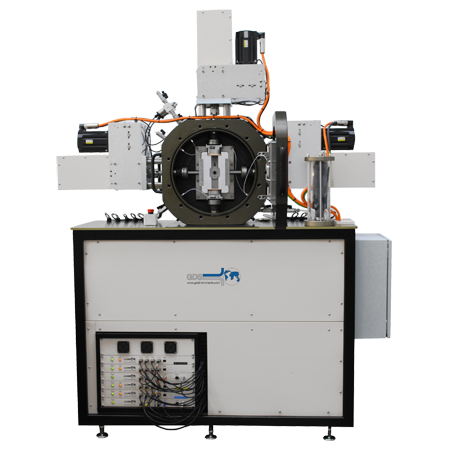
荷兰Geomil Equipment B.V. 公司MANTA-200海床静力触探(CPT)试验系统是目前新型的海床静力触探(CPT)试验系统,其独特的链式驱动设计,带来了海洋静力触探系统的令人想不到的改变。可快速、精确地测试离岸海底土层力学性质,可以在500m以上水深地近岸环境中使用,也可以在4000m水深地离岸环境中使用。
(1)主体框架/裙板/配重块
(2)链式驱动连续贯入系统
(3)压力补偿电源包
(4)常压容器
(5)传感器和深度编码器
(6)脐带张力绞盘
(7)控制及数据采集系统
1.主体框架/裙板/配重块
框架主要是用来承载控制系统、电源、驱动系统和数据采集系统而设计的。一般在框架的顶部设计有工作平台,操作人员可以在工作平台上完成探杆的连接和拆卸工作(图5),工作平台在探杆连接工作结束后,可以拆卸下来以减轻主体框架的重量。在框架的顶部一般安装有便于起吊的钢缆,钢缆的安装方式一般有两种,一种是单钢缆吊装方式,另外一种是双钢缆吊装方式。其中单钢缆吊装方式安装简便,但试验过程中很难控制主体框架的平衡,且吊装的重量有限制;双钢缆吊装方式一般采用对角线的布设方式,该方式具有吊装平稳,吊装重量大的优势。目前,一般都推荐采用双钢缆的吊装方式。
配重块是用来增加设备的重量,提供更大的反力,使贯入深度增加的辅助设备。配重块的安装可以分为两种,一种是在框架的侧面安装,为了保证设备的平衡,一般采用对称安装的方式,分别安装2、4、6、8块配重,每块配重的重量一般为2~2.5吨,这样安装的优点是安装和拆卸方便,不增加设备的高度,但对采用月池吊装方式的试验来说,由于配重块安装在侧面,裙板的尺寸增大,相对月池的尺寸也需要增大,对船体结构的要求高。另外一种是在框架的底部安装,采用与裙板尺寸一样的配重,这样安装的优点是不增加裙板的侧向尺寸,但会增加整套设备的高度,吊装会有一定的要求。总之,具体采用哪种配重,需要根据实际工程的需要来选择。


图4主体框架、裙板及配重 图5操作人员在工作平台上
2.链式驱动连续贯入系统
目前,海床静力触探(CPT)试验系统的贯入方式主要分为两种,一种是采用齿轮驱动的贯入方式(图6),另外一种是采用链式驱动连续贯入方式(图7)。其中齿轮驱动贯入方式以荷兰辉固(Fugro)集团公司的SEACALF系统和荷兰范登堡(A.P.Van Den Berg)公司的ROSON系统为代表。而链式驱动连续贯入方式是在齿轮驱动贯入方式的基础上发展起来的一种新型的海床静力触探(CPT)试验系统贯入方式,以荷兰Geomil Equipment B.V.公司的MANTA-200系统为代表,克服了齿轮驱动贯入方式的一些不足,可以提供更大的贯入力、且操作简便,性价比更高。
齿轮驱动系统的贯入力是由四个摩擦齿轮夹持探杆贯入操作,贯入力为4吨或10吨,不同的贯入力需要更换摩擦轮和泥土擦,该系统只可以驱动探杆,无法驱动套管。该驱动系统的缺点是:由于探杆与驱动齿轮之间为两点夹持驱动,这样的驱动方式容易造成探杆打滑或折断,同时驱动力大小与齿轮的大小有关,驱动力最大只能达到10吨。
链式驱动连续贯入方式采用两套链条液压驱动(图8),即可以驱动探杆也可以驱动套管。由于两套链条将探杆和套管紧紧夹住,为面接触(图9),因此避免了齿轮驱动重出现的探杆打滑或折断的可能,同时由于接触面增加,贯入力很容易达到20吨,且大小可调,不用更换部件,相当于一套设备就可以满足齿轮驱动的两套设备的功能,且贯入力更大,性价比更高。采用链式驱动连续贯入方式,贯入速度可在18~28mm/秒之间调整,提升速度可在18~90mm/秒之间调整。


图7齿轮驱动贯入方式 图8链式驱动连续贯入方式


图9链式驱动实物 图10链式驱动(左)与齿轮驱动(右)原理对比图
3.水下传感器
海床静力触探(CPT)试验系统的所有传感器都安装在主框架中,安放于水下,这些传感器均具有优质的防水,承高水压功能。主要传感器包括:深度编码器、框架倾斜指示器、转速表、系统压力传感器、环境压力传感器和温度电源包等等。
4.设备的吊放
为保证海床静力触探(CPT)试验系统的正常使用,需配备合适的吊装滑轮、探杆恒张力钢缆和传输数据的脐带电缆等(图11)。

图11吊装滑轮、恒张力钢缆及脐带电缆
海床静力触探(CPT)试验系统的探杆需要在试验之前就全部接好,放入海底,为了保证探杆的垂直,需要在探杆的顶部配装恒张力钢缆,将探杆在水中拉紧,在整个试验过程中保持钢缆的垂直。
海床静力触探(CPT)试验系统的试验数据是通过脐带电缆传输到水/地面的。
5.控制及数据采集系统
海床静力触探(CPT)试验系统一般采用两套控制系统(图12),一套为机械控制的系统,该系统控制海床静力触探(CPT)试验系统的吊放、对中、水平等操作,一般采用操纵杆和HMI控制界面。另外一套为试验数据采集和处理软件,可以在试验的过程中实时显示试验的参数和曲线,试验结束后,通过系统的软件可以整理出一套完整的试验报告,整个过程的操作都非常智能化,非常简便。


图12 MANTA-200 V2 MDS 控制及数据采集系统
如您想了解更多该产品及其应用的信息,欢迎垂询Geomil中国区独家代理服务商欧美大地:服务热线400-700-9998,邮箱marketing@epc.com.hk。