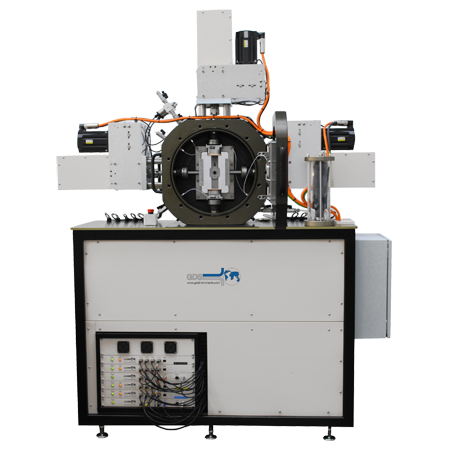
图1 平板拖车上的Panther-200
说明:上图来自2016年7月向山西省交通科学研究院顺利交付现场拍摄
完整的一体化静力触探车。集贯入装置、探杆、电缆、探头、数据采集仪于一体,开展试验方便、快捷。
自动化程度高。Panther 200的自动化主要体现在以下几个方面:自动夹具可以自动夹紧和松开探杆;深度编码器对深度进行自动、准确测定;接近开关能自动感知探杆是否在往下贯入。
不用下地锚可提供20吨的反力。Panther 200自重20.6吨,与需要下地锚的贯入设备相比,Panther 200不下地锚可提供20吨的反力,提高了工作效率。
机动性能好。Panther 200自带两条履带,单条履带宽70cm,降低了对混凝土路面的破坏,同时使得Panther200可以在崎岖、泥泞、松软的不良工地现场行动自如。
结构设计合理。将发动机设置在履带车的后部,与工作舱之间设置隔音板,降低了噪音对工作舱内操作人员的影响。
装配有发动机、液压系统。Panther 200能灵活地行走、爬坡、转弯,能提供20KN的贯入液压,能支撑起20.6吨的整个履带车。
全封闭式的工作舱。无论外面刮风下雨的恶劣环境,不影响在舱内开展静力触探试验,改善了工作环境。
全车的设计涵盖了安全理念。履带车的行走须通过操作人员使用遥控器站在远离履带车的位置进行操作,保证操作人员的安全;履带车的顶部四周 设置有安全警示灯,警示周围操作人员注意安全;遥控器上设置有紧急停止开关,防止发生紧急情况,可以及时终止;履带车上重要部位设置警示标签,提醒操作人员注意防护。
全天候工作。履带车内设计有电源系统,工作舱内有六盏灯。即使在夜晚或者光线差的时候也不影响试验进行。
工作舱内的布局符合人体工学的设计。工作台、探杆架布置在顺手的位置,方便拿取;计算机的位置、控制台的高度、倾斜度均按照人体工学进行设计,方便了操作者进行控制和查看。
可以实时查看静力触探试验状态。通过计算机上显示的数据和曲线,可以实时查看探头的锥尖阻力、侧壁摩阻力、孔隙水压力、探头倾斜度以及贯入速度,以便操作者进行控制和调节。
下文,将对Panther 200的各个部分进行详细介绍。
Panther 200履带式静力触探车主要由两部分组成:下部是底盘,上部是工作舱(图2)。
底盘上有两条钢履带,控制着履带车的行走、爬坡、转弯等。Panther-200自重20.6吨,底盘上有配重块,占据了履带车的大部分重量。底盘的前后共有三个液压千斤顶,前面两个后面一个,用于将履带车升起、调平,充分提供反力。千斤顶的升降是通过工作舱内控制台上的手柄进行控制的。
工作舱前部有一个门,操作人员可以进入;工作舱的墙壁上有4个窗户,可以透光;工作舱的顶部有一个风箱,可以伸缩,试验时升起,试验结束后缩回。
 图2 履带车的底盘和工作舱
图2 履带车的底盘和工作舱
工作舱后部是履带车的动力部分,里面有发动机、液压油箱、柴油箱、冷却器(图3)。

图3 履带车的后部以及发动机和液压油箱
打开工作舱的门,就可以进入到工作舱内部(图4)。

图4 Panther-200工作舱内部照片
2.1 贯入架
工作舱内部,天花板上有6盏灯,墙壁上开关,可以在光线不足时点亮灯光。工作舱的中间,是静力触探试验的贯入架,贯入架上有夹具、接近开关以及深度编码器。试验过程中,往下贯入探杆时,夹具会自动夹紧探杆,接近开关自动接通,采集仪开始记录数据。往上提贯入架时,夹具会自动松开,接近开关自动断开,采集仪停止数据记录。如此,实现了数据的自动采集。回收探杆时,自动夹具的功能又是反过来的。往上提时夹紧,往下降时松开。国产的贯入设备是没有自动夹具的,需要人工去插拔,费时费力。深度编码器是用来自动记录探头贯入的深度的。
2.2 遥控器
工作舱的右边有一个桌子,桌子上安装有台钳,现场可以在桌子上进行一些工作。桌子上挂有一个遥控器,遥控器上各个按钮的功能如图5所示。履带车的移动是通过这个遥控器进行控制的。它可以通过WIFI与履带车的动力控制系统连接,也可以通过有线的方式进行连接。主要的两个按钮,分别控制履带车两侧的履带前进和后退。同时向上按,履带车前进;同时向下按,履带车后退;一个向上按一个向下按,履带车转弯。履带车的行进速度也是可以选择的,“兔子”是快速,“乌龟”是慢速。遇到紧急情况,可以按下红色紧急开关,履带车立刻停止移动。

图5履带车的遥控器
2.3 探杆架与储物柜
工作舱的右边还有一个探杆架,探杆全部头对尾、尾对头整齐地排列在架子上。探杆架下方有一个储物柜,可以存放物品(图6)。

图6 Panther-200的探杆架和储物柜
2.4 控制台
工作舱的左边是履带车的控制台,这个控制台控制着全车的动力系统、液压系统、电力系统、数据采集系统。
控制台的顶部是一个平面,试验过程中,可以将计算机摆放在这里,可以方便地实时查看探头的状态,以便对贯入过程进行控制。
控制台的中部有很多手柄,通过这些手柄实现对静力触探车各个部分的控制。左上角是一个功能选择手柄。往上时,液压系统用于履带车的调平。这时可以通过右上角的三个手柄对履带车进行调平。右上角的三个手柄依次控制左前方、后方、右前方三个液压千斤顶。试验之前,要将三个液压千斤顶完全伸出,以便充分提供静力触探试验所需的200KN反力。通过观看水平调节气泡居中,可以将履带车调平。功能选择手柄向下时,液压系统用于操作履带车的贯入架。右下角有两个手柄,一个手柄是控制贯入架的升降。这个手柄主要是用来控制探杆以20mm/s的速度匀速贯入的。如果速度过快或者过慢,可以旋转左侧的压力或速度旋钮进行调节。另一个手柄是控制探杆保持锁的开闭。向上时,探杆保持锁打开,探杆被锁住,无法移动,可以防止探杆掉入到钻孔内。向下时,探杆保持锁关闭,探杆可以自由移动。左下角的这个手柄是控制贯入架升降的。贯入架向下移动时可以以20mm/s的速度匀速下降,上升时,可以升起。
控制台的下部控制履带车的电源、动力和数据采集。左上角是遥控器的电池充电器,如果遥控器的电池没电了,可以插在这里充电。充电器的下面是整个履带车电力系统的开关,打开这个开关后,履带车内的发动机、顶灯、警示灯、电源线路才会通电。中间的这个按钮是履带车警示灯的开关,按下以后,履带车外面四个角的警示灯会闪烁,提醒工作舱外面的人员注意安全。这个按钮的下面是履带车的油箱油量表,该履带车使用的燃料是柴油。右边是履带车的电子启动器,通过旋转钥匙,可以启动履带车的发动机。旁边有一个小摇杆,可以上下调节发动机的转速。发动机的实时转速会在电子启动器的显示屏上显示出来。启动后,发动机的转速为750rpm,行进时,要将发动机的转速增大到1200rpm左右,试验过程中转速为900rpm左右。最下面是一台嵌入式静力触探数据采集仪,控制着静力触探试验的数据采集。采集仪的面板上只有三个按钮:一个开关,一个复位键,一个深度记录选择键。正常工作情况下,设置为AUTO即可。
控制台上各个部分的说明如图7所示。


图7工作舱内的控制台
控制台的背面有电源插座,可以给计算机、真空泵等供电。
2.5 工作舱的地板
工作舱的地面上有两块盖板:一块小盖板和一块大盖板。打开小盖板,可以看到一个金属格网(图8),可以通过这个金属格网查看探头是否接触地面。打开大盖板,可以看到里面有几个蓄电池,它们为履带车供电。

图8工作舱内的地板